
MainTelRob - Maintenance and Telematics for Robots
26.11.2012
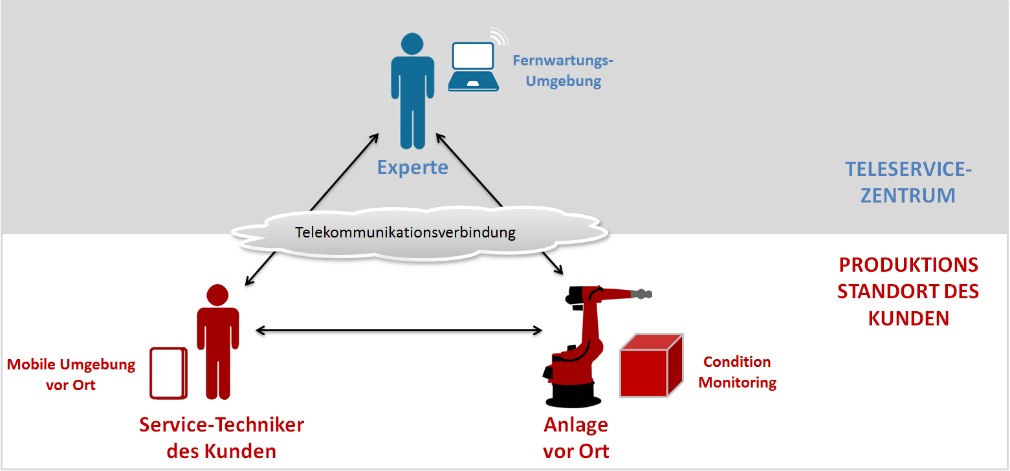
Der enorme Fortschritt in den Telekommunikations- und Informationsverarbeitungstechniken ermöglicht die Bereitstellung immer anspruchsvollerer Dienstleistungen auch über große Distanzen hinweg, ohne dass energieaufwändige Reisen durchzuführen sind. Durch die Verbindung dieser Disziplinen mit der Regelungs- und Automatisierungstechnik in der Telematik eröffnen sich effiziente Möglichkeiten, Sensor- und Zustandsdaten von entfernten Industrieanlagen zu erfassen und so nun auch in echtzeitkritischen Situationen zu reagieren. So werden beispielsweise bei der Fernwartung von Maschinen in energieeffizienter Weise noch intensiver die Daten reisen und nicht mehr die Menschen. Maschinen lassen sich durch kontinuierliche Überwachung auf dem energie-optimalen Arbeitspunkt halten trotz Änderungen in der Arbeitsumgebung. Obwohl einfache Telematik-Anwendungen auf dem Markt bereits erfolgreich eingesetzt werden, bleiben dennoch spannende interdisziplinäre Forschungsprobleme zu lösen, um die Zuverlässigkeit und Effizienz von Systemen und Anlagen durch interaktive Dienstleistungen entscheidend zu steigern.
Detaillierter Projektinhalt
Insbesondere sollen hier Schwerpunkte bei dem Einsatz von Methoden der Augmented / Virtual Reality (AR/VR) gelegt werden, um für den Fernbediener intuitiv die Situation am entfernten Standort darzustellen, Systemzustände zu analysieren und Abweichungen zu visualisieren,
der Kombination autonomer Reaktionen und der Fernbedienung entwickelt werden, um so Belastungsspitzen abzufangen und Schadensprävention (insbesondere während kritischer Betriebsphasen) zu ermöglichen.
Diese beiden wesentlichen Ebenen eines integrierten nutzerfreundlichen Fernwartungssystems sollen sich wechselseitig stützen, um so die Fernwartung komplexer Automatisierungsanlagen zu ermöglichen.
Derartige innovative interaktive Kontrollfähigkeiten gehen weit über die in diesem Projekt exemplarisch behandelte Anwendung hinaus, unterstützen die Erschließung ferner Märkte durch Bereitstellung von schnell verfügbarer, energieeffizienter Wartungsunterstützung und die Reduzierung von Stillstandszeiten eines breiten Spektrums von Anlagen in der Produktion.
Auszeichnung
Das Projekt wurde im Rahmen des FuE-Programms “Informations- und Kommunikationstechnik” des Freistaates Bayern mit dem Prädikat BEST OF 2015 ausgezeichnet.
Förderung
Dieses Projekt wird durch das Bayerisches Staatsministerium für Wirtschaft, Infrastruktur, Verkehr und Technologie gefördert.
Projektpartner
- Zentrum für Telematik e.V.
- Reis Robotics / Reis GmbH & Co. KG Maschinenfabrik, Obernburg a.M.
- Braun / Procter & Gamble, Marktheidenfeld
Kontakt
Für weiterführende Informationen kontaktieren Sie uns unter: 
Publikationen
D. Aschenbrenner, N. Maltry, J. Kimmel, K. Schilling
4th IFAC Symposium on Telematics Applications, 2016 (IFAC)
Porto Alegre, Brazil (2016)
D. Aschenbrenner, F. Sittner, M. Fritscher, M. Krauss, K. Schilling
4th IFAC Symposium on Telematics Applications (IFAC)
Porto Alegre, Brazil (2016)
M. Albert, D. Aschenbrenner, P. Barth, M. Fritscher, K. Schilling
4th IFAC Symposium on Telematics Applications (IFAC)
Porto Alegre, Brazil (2016)
D. Aschenbrenner, M. Latoschik, K. Schilling
22nd ACM Symposium on Virtual Reality Software and Technology (VRST)
Munich, Germany (2016)
M. Fritscher, F. Sittner, D. Aschenbrenner, M. Krauss, K. Schilling
4th IFAC Symposium on Telematics Applications (IFAC)
Porto Alegre, Brazil (2016)
M. Fritscher, F. Sittner, D. Aschenbrenner, M. Krauss, K. Schilling
4th IFAC Symposium on Telematics Applications (IFAC)
Porto Alegre, Brazil (2016)
A. Kheirkhah, D. Aschenbrenner, M. Fritscher, F. Sittner, K. Schilling
IFAC-PapersOnLine
(2015)
p. 147-152
D. Aschenbrenner, F. Sittner, M. Fritscher, M. Krauss, K. Schilling
2nd IFAC Conference on Embedded Systems, Computational Intelligence and Telematics in Control (CESCIT)
Maribor, Slovenia (2015)
D. Aschenbrenner, F. Leutert, F. Sittner, M. Fritscher, K. Schilling
SPS-IPC-Drives Konferenz (SPSIPC)
Nürnberg, Germany (2014)
Magdalene-Schoch-Str. 5
97074 Würzburg - Germany
Daniel Eck (Geschäftsführer)
Telefon: +49 (0)931 615 633-10
Fax: +49 (0)931 615 633-11
E-Mail: info(at)telematik-zentrum.de